What we do
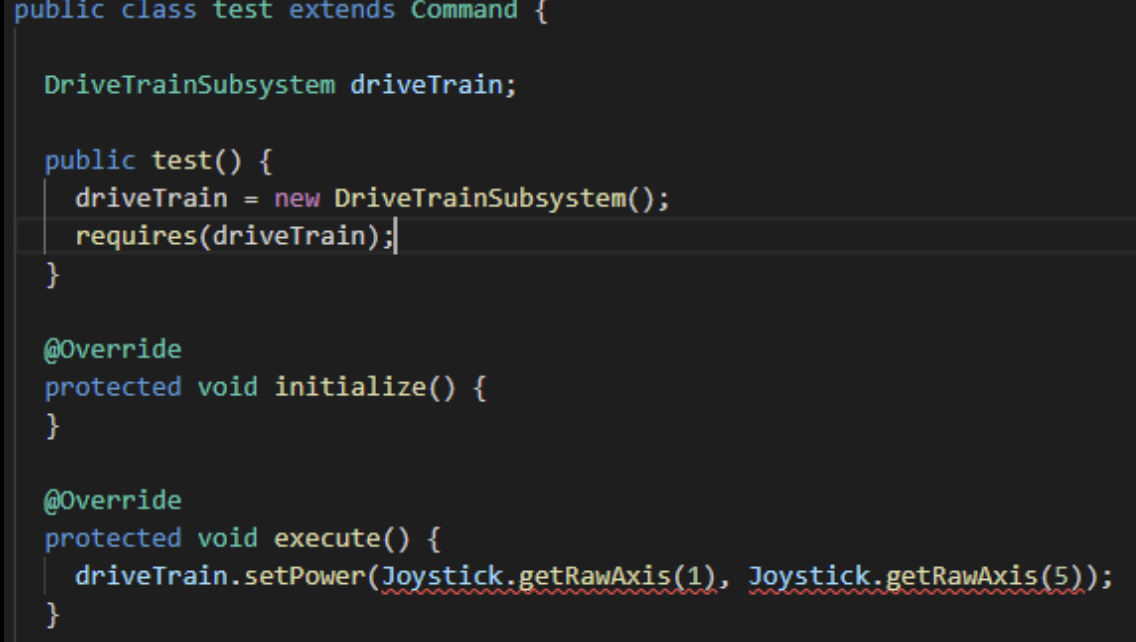
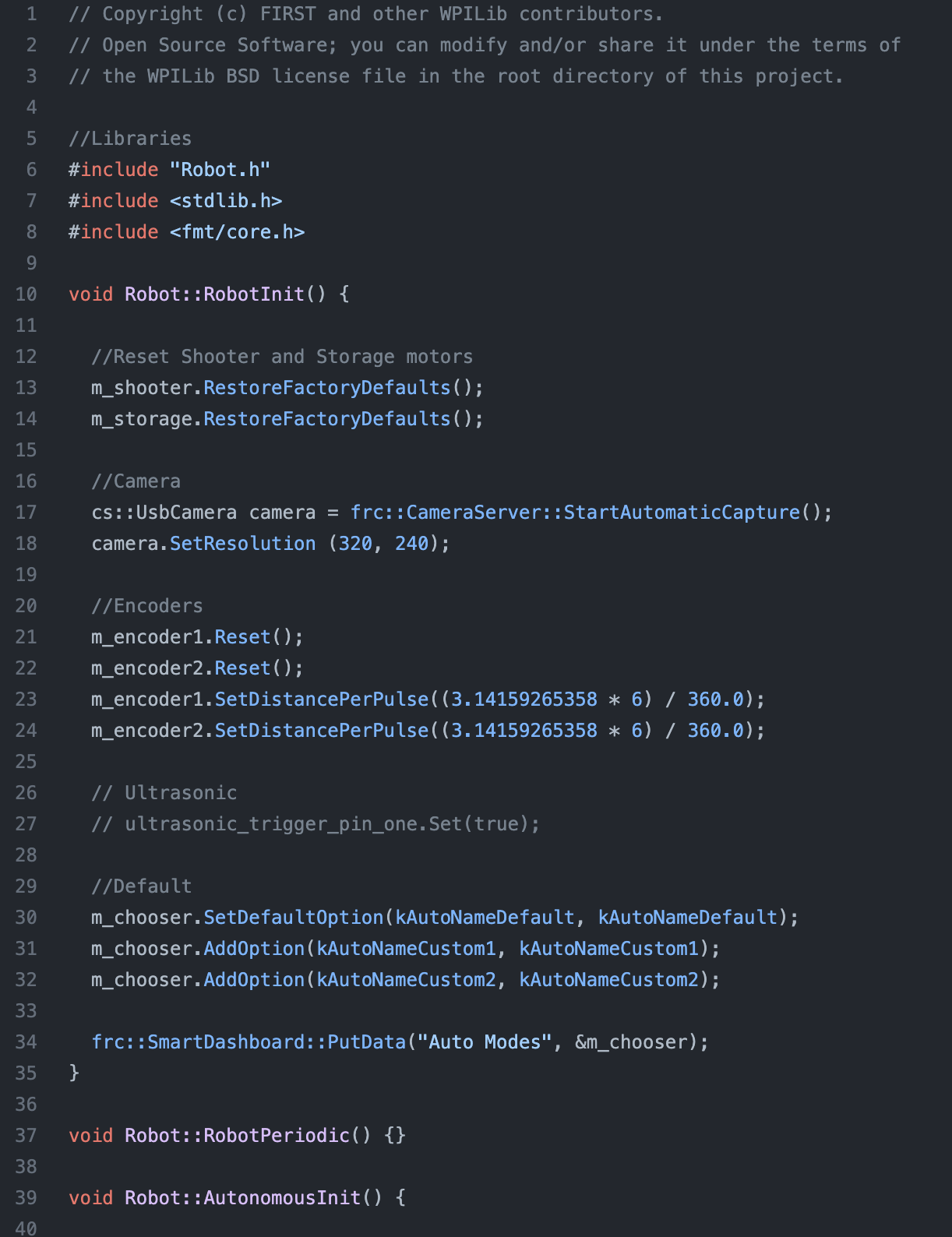
The software subteam in Spark Youth Robotics Club a critical role in designing and implementing the control systems for the robot. One of the key tools that this subteam may use is WPIlib, a software library developed by Worcester Polytechnic Institute (WPI) for use in the FIRST Robotics Competition. WPIlib provides a wide range of functionality for controlling the robot's motors, sensors, and other devices, as well as for developing user interfaces and other software components.
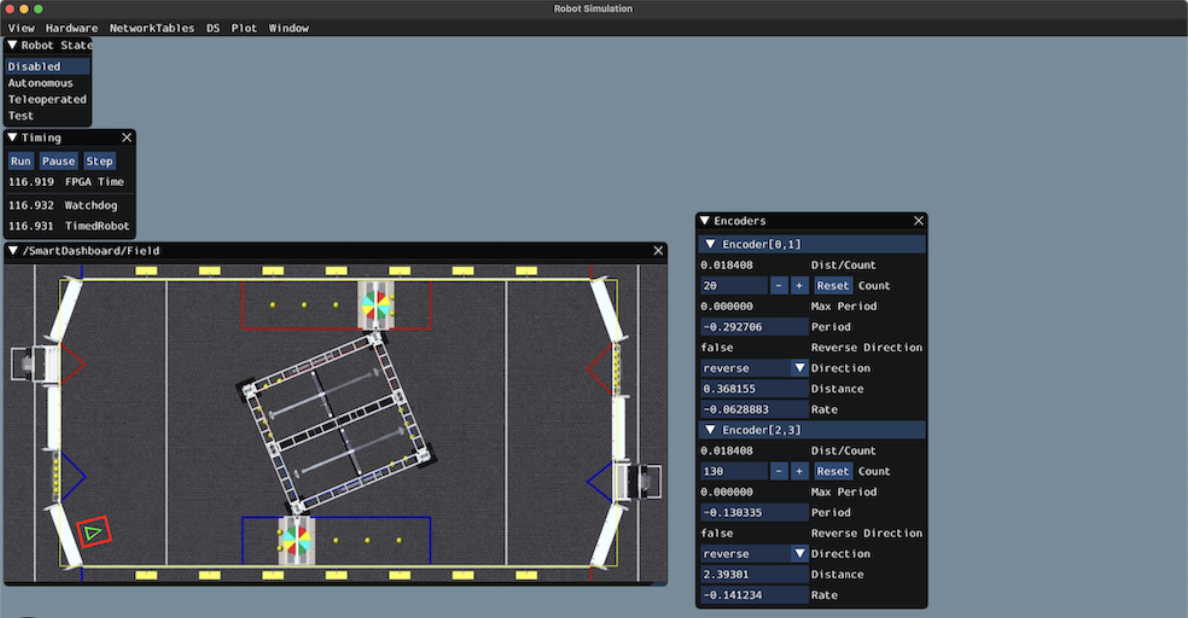
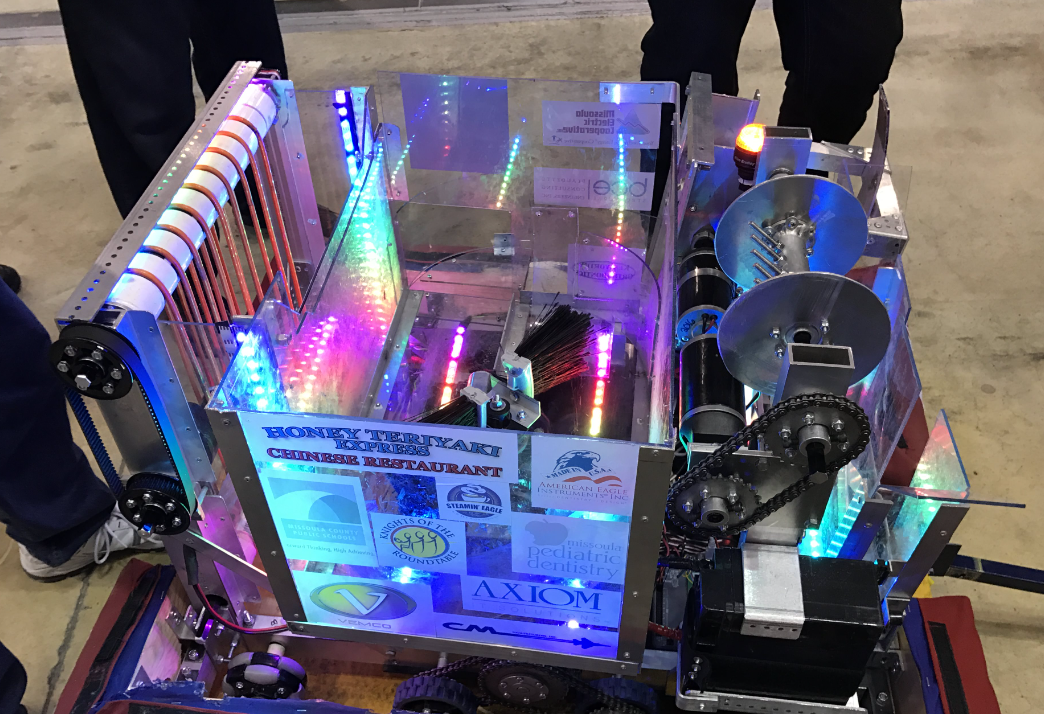
The software subteam is responsible for creating the code that tells the robot what to do and how to respond to different situations. This requires a deep understanding of the robot's hardware, as well as the rules of the competition and the strategies the team wants to employ. The subteam members will collaborate closely with the mechanical subteam, using WPIlib to develop the software that controls the robot's various subsystems. They will also spend a lot of time testing and refining their code, to ensure that the robot performs well on the field.